Hardware Integration: IMX-6 Module¶

Pinout¶

| Pin | Name | I/O | Description |
|---|---|---|---|
| 23-27 | Not Connected | - | Not connected internally. Connect to ground (GND). |
| 0,11,21 | GND | - | Supply ground |
| 1 | USB_P | I/O | USB Data Positive Line |
| 2 | USB_N | I/O | USB Data Negative Line |
| 3 | VBKUP | I | Optional battery backup feature (reserved for future use, not currently supported) intended to enable deep-sleep and warm/hot start operation in future firmware. For future use, VBKUP may be connected to a 1.4V–3.6V backup battery. If no backup battery is used, VBKUP must be connected (tied) to VCC. |
| 4 | G1/Rx2/RxCAN/SCL | I/O | GPIO1 Serial 2 input (TTL) Serial input pin from CAN transceiver* I2C SCL line |
| 5 | G2/Tx2/TxCAN/SDA/STRB | I/O | GPIO2 Serial 2 output (TTL) Serial output pin to CAN transceiver* I2C SDA line Strobe time sync input |
| 6 | G6/Rx1/MOSI | I/O | GPIO6 Serial 1 input (TTL) SPI MOSI |
| 7 | G7/Tx1/MISO | I/O | GPIO7 Serial 1 output (TTL) SPI MISO |
| 8 | G8/CS/STRB | I/O | GPIO8 SPI CS Strobe time sync input |
| 9 | G5/SCLK/STRB | I/O | GPIO5 SPI SCLK Strobe time sync input |
| 10 | G9/nSPI_EN/STRB/DRDY | I/O | GPIO9 SPI Enable: Hold LOW during boot to enable SPI on G5-G8 Strobe time sync input or output. SPI data ready (DRDY) is active-high on this alternate pin; data is available when high |
| 12 | nRESET | I | System reset on logic low. May be left unconnected if not used. |
| 13 | G14/SWCLK | I/O | GPIO14 |
| 14 | G13/XSDA/PPS2/DRDY | I/O | GPIO13 GNSS2 PPS Data Ready (DRDY) is active high Alt I2C SDA |
| 15 | G12/XSCL/SWO | I/O | GPIO12 Alt I2C SCL |
| 16 | G11/SWDIO | I/O | GPIO11 |
| 17 | G10/BOOT | I/O | Leave unconnected. BOOT mode used in manufacturing. !!! WARNING !!! Asserting a logic high (+3.3V) will cause the IMX to reboot into bootloader (DFU) mode. |
| 18 | G4/Rx0 | I/O | GPIO4 Serial 0 input (TTL) |
| 19 | G3/Tx0 | I/O | GPIO3 Serial 0 output (TTL) |
| 20 | G15/PPS1 | I | Input for GNSS PPS for time synchronization pulse. |
| 22 | VCC | I | 3.3V supply input |
| 28 | QDEC0.A | I | Ground vehicle wheel sensor 0 quadrature channel A input. Has an internal pull-up/pull-down resistor and can be left floating if not used. |
| 29 | QDEC0.B | I | Ground vehicle wheel sensor 0 quadrature channel B input. Has an internal pull-up/pull-down resistor and can be left floating if not used. |
| 30 | VUSB | I | 3.0V to 3.6V required for USB operation. Can be left floating if USB is not needed. |
| 31 | QDEC1.A | I | Ground vehicle wheel sensor 1 quadrature channel A input. Has an internal pull-up/pull-down resistor and can be left floating if not used. |
| 32 | QDEC1.B | I | Ground vehicle wheel sensor 1 quadrature channel B input. Has an internal pull-up/pull-down resistor and can be left floating if not used. |
*External transceiver required for CAN interface.
Application¶
UART Interface¶
The following schematic demonstrates a typical setup for the IMX-6 module. If the system processor is not capable of updating the IMX firmware, it is recommended to add a header to an alternate IMX serial port for firmware updates via an external computer. The reset line is not necessary for typical use.

USB Interface¶
To use the USB interface, VUSB (pin 30) must be supplied with 3.0 V to 3.6 V (typically +3.3 V). If USB functionality is not required, VUSB may be left floating.
SPI Interface¶
The SPI interface is enabled by holding the pin 10 low during boot up.

GNSS Interface¶
The following is an example of how to interface the IMX with a GNSS receiver.

Manufacturing¶
Soldering¶
The IMX-6 can be reflow soldered. Reflow information can be found in the Reflow Information page of this manual.
Tape Packaging¶
The IMX-6 modules are available in cut tape as well as tape and reel packaging. The following image shows the feed direction and illustrates the orientation of the IMX-6 module on the tape:
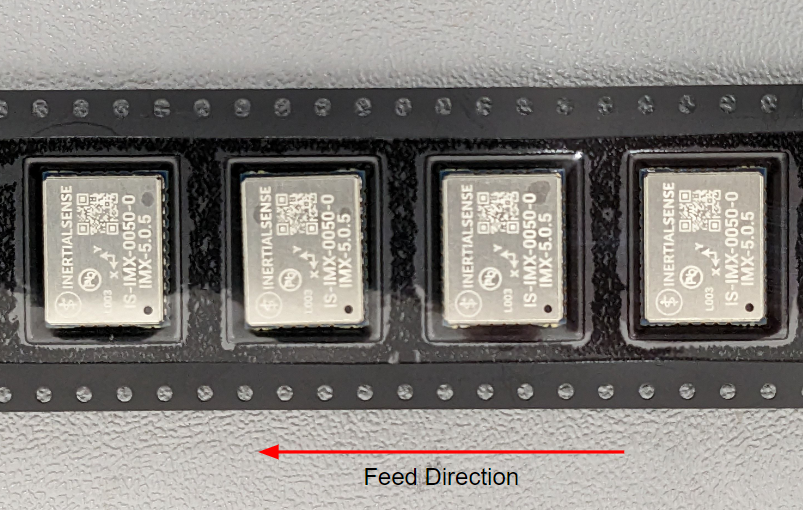 The feed direction to the pick and place pick-up is shown by the orientation of the IMX-6 pin 1 location. With pin 1 location on the bottom of the tape, the feed direction into the pick and place pick-up is from the reel (located to the right of the figure) towards the left.
The feed direction to the pick and place pick-up is shown by the orientation of the IMX-6 pin 1 location. With pin 1 location on the bottom of the tape, the feed direction into the pick and place pick-up is from the reel (located to the right of the figure) towards the left.
The dimensions of the tapes for the IMX-6 are shown in the drawing below:
Hardware Design¶
Recommended PCB Footprint and Layout¶
A single ceramic 100nF decoupling capacitor should be placed between and in close proximity to the IMX pins 21 and 22 (GND and Vcc). It is recommended that this capacitor be on the same side of the PCB as the IMX and that there not be any vias between the capacitor and the Vcc and GND pins. The default forward direction is indicated in the PCB footprint figure and on the IMX shield as the X axis. The forward direction is reconfigurable in software as necessary.
Design Files¶
![]()
Open source hardware design files, libraries, and example projects for the IMX module are found at the Inertial Sense Hardware Design repository hosted on GitHub. These include schematic and layout files for printed circuit board designs, and 3D step models of the InertialSense products usable for CAD and circuit board designs.
Reference Design Projects¶
The IG-2.1 circuit board project serves as a reference design that illustrates implementation of the IMX PCB module.